利得特性
そのフィルタが持つ周波数毎の利得を数値化したもの。
利得がほとんど減衰しない帯域を通過帯域、減衰する領域を阻止帯域と言い、
実用上、サンプリング周波数の半分までを求めることが多い。
オールパス特性を除いて、全ての特性にはカットオフ周波数が存在します。
特性の種類によって次の名称に分けられます。
- ・ローパス特性
- 低周波側に通過帯域、高周波側に阻止帯域を持つ特性
- ・ハイパス特性
- 高周波側に通過帯域、低周波側に阻止帯域を持つ特性
- ・バンドパス特性
- 特定の帯域に通過帯域が存在し、その他の帯域を阻止する特性
- ・バンドエリミネート特性
- 特定の帯域を阻止し、その他の帯域は通過帯域として存在する特性
- ・オールパス特性
- 全ての帯域において利得が0dBである特性
位相補償に用いられる。
カットオフ周波数
利得が変化するポイントの周波数。
ローパス特性であれば、通過帯域から阻止帯域に変化する点を指します。
ローパス・ハイパスは1点、バンドパス・バンドエリミネートは2点のカットオフ周波数を持ちます。
位相特性
そのフィルタが持つ入出力の位相差を数値化したもの。
位相特性が直線になるものを、直線位相特性と呼び、周波数帯全域において、
入力前と出力後の遅延時間が一定になるという特徴があります。
直線位相でないものは、入力周波数によって位相による遅延時間が異なるため、波形が歪みやすくなります。
画像処理といった、信号の歪みが問題になる処理に対しては、直線位相で設計することが求められます。
差分方程式
フィルタの入出力の関係を時間領域で表したもの。
ディジタルフィルタの設計とは、最終的に差分方程式を求めることであると言えます。
差分方程式を導き出せれば、ソフトウェアとして実装することが可能になります。
インパルス応答
ディラックのデルタ関数で表されるインパルス信号を入力した時に得られる出力信号。
FIRフィルタにおいては、差分方程式の各係数と一致します。
IIRフィルタにおいては、係数との関連性はありませんが、安定性の判断材料として用いられます。
移動平均フィルタ
新しい信号値を既存の信号値の平均によって求める方法。
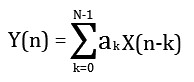
既存の信号値をX(n)、新しい信号値をY(n)とすると、差分方程式は次のようになります。

ここから得られる利得特性はローパス型になります。
Nはタップ数と呼ばれ、大きくなるほどカットオフが低周波数側に移動し、
そのカーブも急峻になりますが、計算量が増大するというデメリットが生じます。
また、係数が全て1/Nで統一されるため、タップ数に関わらず位相特性が直線になるという特徴があります。
入力信号とローパスフィルタで得られた出力信号の差分を取れば、ハイパス特性に変換することができます。

タップ数が2の場合、このフィルタは直線位相になり、利得特性も綺麗なハイパス曲線になります。
タップ数が3以上の場合は直線位相になりません。
また、利得特性が0[dB]を超える領域も出現し、あまり実用的ではありません。
タップ数が3以上のハイパスフィルタを設計する場合は、FIRフィルタとして設計するほうが実用的でしょう。
FIRフィルタ
FIRは次の差分方程式で表されるフィルタを指します。
FIRはFinite Impulse Responseの略であり、インパルス応答が必ず収束するという特徴を持っています。
また、利得特性の種類に関わらず直線位相で設計することが可能です。
係数の値を全て1/Nにすると移動平均フィルタの差分方程式と一致することから、移動平均フィルタはFIRの一種ということになります。
IIRフィルタ
IIRは次の差分方程式で表される持つフィルタを指します。

IIRはInfinite Impulse Responseの略であり、設計によってはインパルス応答がいつまでも収束しません。
インパルス応答が収束できなければ、そのフィルタは不安定になると推測されます。
また、基本的に直線位相で設計することが難しいため、直線位相が求められる場面では使用できません。
FIRと比較するとデメリットばかりが目立ちますが、同程度の利得特性を得るのに
FIRより1/10程度の低いタップ数で設計できるというメリットがあります。
位相特性を犠牲にして、より急峻な利得特性を実現しているフィルタであるとも言えます。
このサイトで設計されたIIRフィルタは全て安定であることが保障されていますので、
特に安定性を気にかける必要はありません。